Canadarm2
Canadarm2 (myös Mobile Servicing System eli MSS) on Kansainvälisen avaruusaseman robottikäsivarsi, jota käytetään aseman kokoonpanossa ja huoltotehtävissä. Varsinaisen järjestelmän nimi on Mobile Servicing System eli MSS mutta se tunnetaan paremmin keskeisimmän komponenttinsa Canadarm2 nimellä. Järjestelmään kuuluu myös Mobile Transporter ja Mobile Base System, joilla Canadarm2 liikkuu asemassa kiinniolevia kiskoja myöten sekä Canadarm2n päähän asennettava Special Purpose Dexterous Manipulator eli Dextre robotti, jolla voidaan hoitaa aiemmin avaruuskävelyn vaatineita tehtäviä.
Canadarm2
[muokkaa | muokkaa wikitekstiä]
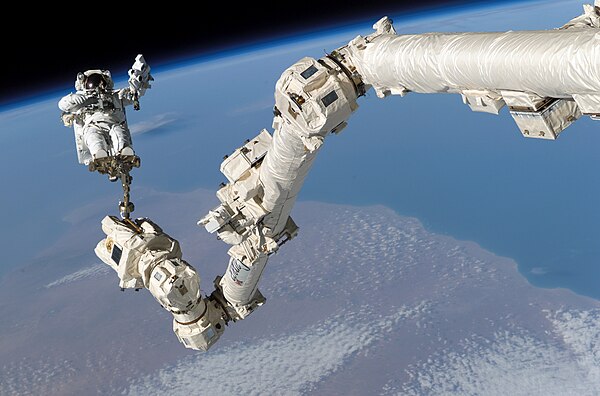
Canadarm2n suunnitteli ja rakensi MacDonald, Dettwiler and Associates Kanadan avaruusjärjestölle. Canadarm2 laukaistiin kiertoradalle STS-100-lennolla huhtikuussa 2001. Se on kehittyneempi ja suurempi versio sukkuloissa olevista Canadarm-robottikäsivarsista. Canadarm2 on 17,6 metriä pitkä ja siinä on seitsemän motoroitua niveltä. Sen massa on 1 800 kg ja halkaisija 350 mm. Käsivarrella voidaan käsitellä suurimmillaan 116 000 kg massaisia kappaleita ja avustaa avaruussukkuloiden telakoitumista.
Canadarm2 voi siirtyä avaruusasemalla yhdestä kiinnityskohdasta (Power Data Grapple Fixtures eli PDGF) toiseen siten että sen kiinnityspää asemaan vaihtuu.
Canadarm2n ohjaaja voi seurata mitä on tekemässä ohjausyksikön (Robotic Work Station eli RWS) nestekidenäytöistä. RWS-yksiköitä on koko asemalla kaksi mutta vain yhtä käytetään kerrallaan. Valmiissa avaruusasemassa toinen ohjausyksikkö on Destiny-moduulissa ja toinen Cupola-moduulissa. Toistaiseksi kumpikin on Destiny-moduulissa.
Mobile Transporter ja Mobile Base System
[muokkaa | muokkaa wikitekstiä]
Lennolla STS-110 asennettu Mobile Transporter liikkuu Integrated Truss Structuren kiskoja pitkin. Mobile Transporterin päälle lennolla STS-111 kesäkuussa 2002 asennettiin Mobile Base System eli MBS. Kun Canadarm2 on kiinnitettynä MBS:ään voi se liikkua pitkin koko aseman runkoa parin sentin sekuntinopeudella.[1]
MBS:n virallinen koko nimi on Mobile Remote Servicer Base System.
Special Purpose Dexterous Manipulator
[muokkaa | muokkaa wikitekstiä]
Special Purpose Dexterous Manipulator eli Dextre on pienempi kaksikäsivartinen robotti, jolla on mahdollista tehdä joitain kokoonpano- ja huoltotehtäviä, joihin toistaiseksi on tarvittu avaruuskävelyitä. Se toimitettiin asemalle maaliskuussa 2008 Endeavour-sukkulan lennolla STS-123.
Lähteet
[muokkaa | muokkaa wikitekstiä]- ↑ The Slowest and Fastest Train in the Universe NASA. Arkistoitu 29.3.2008. Viitattu 21.11.2007. (englanniksi)
Aiheesta muualla
[muokkaa | muokkaa wikitekstiä]- ISS Assembly: Canadarm2 and the Mobile Servicing System (Arkistoitu – Internet Archive)
- Canadian Space Agency information about Canadarm2 (Arkistoitu – Internet Archive)