Coordenadas cartesianas

Las coordenadas cartesianas (sistema cartesiano) son un tipo de coordenadas ortogonales usadas en espacios euclídeos, para la representación gráfica de una relación matemática, movimiento o posición en física, caracterizadas por tener como referencia ejes ortogonales entre sí que concurren en el punto de origen. En las coordenadas cartesianas se determinan las coordenadas al origen como la longitud de cada una de las proyecciones ortogonales de un punto dado sobre cada uno de los ejes. La denominación de 'cartesiano' se introdujo en honor de René Descartes, quien las utilizó por primera vez de manera formal.
Las coordenadas cartesianas se usan por ejemplo para definir un sistema cartesiano o sistema de referencia respecto ya sea a un solo eje (línea recta), respecto a dos ejes (un plano, siendo así un sistema bidimensional) o respecto a tres ejes (en el espacio), perpendiculares entre sí (plano y espacio), que se cortan en un punto llamado origen de coordenadas. En el plano, las coordenadas cartesianas se denominan abscisa y ordenada. La abscisa es la coordenada horizontal y se representa habitualmente por la letra x, mientras que la ordenada es la coordenada vertical y se representa por la y.
Al cortarse las dos rectas, dividen al plano en cuatro regiones o zonas, que se conocen con el nombre de cuadrantes:
- Primer cuadrante "I": Región superior derecha
- Segundo cuadrante "II": Región superior izquierda
- Tercer cuadrante "III": Región inferior izquierda
- Cuarto cuadrante "IV": Región inferior derecha
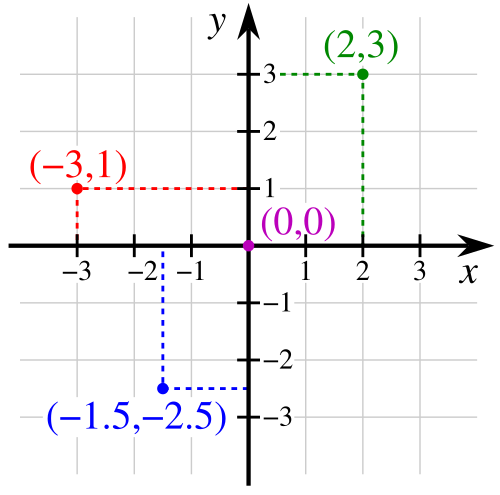
El plano cartesiano se utiliza para asignarle una ubicación a cualquier punto en el plano. En la gráfica se indica el punto +2 en las abscisas y +3 en las ordenadas. El conjunto (2 , 3) se denomina "par ordenado" y del mismo modo se pueden ubicar otros puntos. El cuadrante tiene 4 puntos negativo y positivo ya que el lado izquierdo se le llama negativo que es -x, -y y lado derecho es positivo +x,+y.
Las coordenadas cartesianas son la base de la geometría analítica, y proporcionan interpretaciones geométricas esclarecedoras para muchas otras ramas de las matemáticas, como el álgebra lineal, el análisis complejo, la geometría diferencial, el cálculo multivariante, la teoría de grupos y más. Un ejemplo familiar es el concepto de gráfica de una función. Las coordenadas cartesianas son también herramientas esenciales para la mayoría de las disciplinas aplicadas que tratan con geometría, incluyendo astronomía, física, ingeniería y muchas más. Son el sistema de coordenadas más comúnmente utilizado en gráficos por ordenador, diseño asistido por ordenador y otros procesamiento de datos relacionados con la geometría.
Historia
[editar]
Se denominan coordenadas cartesianas en honor a René Descartes (1596-1650), el célebre filósofo y matemático francés que quiso fundamentar su pensamiento filosófico en el método de tomar un «punto de partida» evidente sobre el que edificaría todo el conocimiento.
Como creador de la geometría analítica, Descartes también comenzó tomando un «punto de partida» en esta disciplina, el sistema de referencia cartesiano, para poder representar la geometría plana, que usa solo dos rectas perpendiculares entre sí que se cortan en un punto denominado «origen de coordenadas».
Tanto Descartes como Fermat utilizaron un solo eje en sus tratamientos y tienen una longitud variable medida en referencia a este eje. El concepto de utilizar un par de ejes se introdujo más tarde, después de que La Géométrie de Descartes fuera traducida al latín en 1649 por Frans van Schooten y sus alumnos. Estos comentaristas introdujeron varios conceptos a la vez que intentaban aclarar las ideas contenidas en la obra de Descartes.[1]
El desarrollo del sistema de coordenadas cartesianas jugaría un papel fundamental en el desarrollo del cálculo por parte de Isaac Newton y Gottfried Wilhelm Leibniz.[2] La descripción del plano en dos coordenadas se generalizó posteriormente en el concepto de espacios vectoriales.[3].
Desde Descartes se han desarrollado muchos otros sistemas de coordenadas, como el coordenadas polares para el plano, y el esféricas y el coordenadas cilíndricas para el espacio tridimensional.
Plano cartesiano
[editar]Con un sistema de referencia conformado por dos rectas perpendiculares que se cortan en el origen , cada punto del plano puede "nombrarse" mediante dos números: (x, y), que son las coordenadas del punto, llamadas abscisa y ordenada, respectivamente, que son las distancias ortogonales de dicho punto respecto a los ejes cartesianos.
La ecuación del eje es , y la del eje es , rectas que se cortan en el origen , cuyas coordenadas son .
Se denomina también eje de las abscisas al eje , y eje de las ordenadas al eje . Los ejes dividen el espacio en cuatro cuadrantes I, II, III y IV, en los que los signos de las coordenadas alternan de positivo a negativo (por ejemplo, las dos coordenadas del punto A serán positivas, mientras que las del punto B serán ambas negativas).
Las coordenadas de un punto cualquiera vendrán dadas por las proyecciones del segmento entre el origen y el punto sobre cada uno de los ejes.
Sobre cada uno de los ejes se definen vectores unitarios (i y j) como aquellos paralelos a los ejes y de módulo (longitud) la unidad. En forma vectorial, la posición del punto A se define respecto del origen con las componentes del vector OA.
La posición del punto A será:
Nótese que la lista de coordenadas puede expresar tanto la posición de un punto como las componentes de un vector en notación matricial.
La distancia entre dos puntos cualesquiera vendrá dada por la expresión:
Aplicación del teorema de Pitágoras al triángulo rectángulo ABC.
Un vector cualquiera AB se definirá restando, coordenada a coordenada, las del punto de origen de las del punto de destino:
Evidentemente, el módulo del vector AB será la distancia dAB entre los puntos A y B antes calculada.
Espacio euclídeo
[editar]Si tenemos un sistema de referencia formado por tres rectas perpendiculares entre sí (X, Y, Z) (abscisa, ordenada y cota), que se cortan en el origen (0, 0, 0), cada punto del espacio puede nombrarse mediante tres números: (x, y, z), denominados coordenadas del punto, que son las distancias ortogonales a los tres planos principales: los que contienen las parejas de ejes YZ, XZ e YX, respectivamente.
Los planos de referencia XY (z = 0); XZ (y = 0); e YZ (x = 0) dividen el espacio en ocho octantes en los que, como en el caso anterior, los signos de las coordenadas pueden ser positivos o negativos.
La generalización de las relaciones anteriores al caso espacial es inmediata considerando que ahora es necesaria una tercera coordenada (z) para definir la posición del punto.
Las coordenadas del punto A serán:
y el B:
La distancia entre los puntos A y B será:
El segmento AB será:
Cambio del sistema de coordenadas
[editar]Tanto en el caso plano como en el caso espacial pueden considerarse tres transformaciones elementales: traslación del origen, rotación alrededor de un eje y escalado.
Traslación del origen
[editar]
Suponiendo un sistema de coordenadas inicial S1 con origen en O y ejes x e y
y las coordenadas de un punto A dado, sean en el sistema S1:
dado un segundo sistema de referencia S2
Siendo los centros de coordenadas de los sistemas 0 y 0´, puntos distintos, y los ejes x, x´; e y, y´ paralelos dos a dos, y las coordenadas de O´, respecto a S1:
Se dice traslación del origen, a calcular las coordenadas de A en S2, según los datos anteriores, que llamaremos:
Dados los puntos O, O´ y A, tenemos la suma de vectores:
despejando
Lo que es lo mismo que:
Separando los vectores por coordenadas:
y ampliándolo a tres dimensiones:
Rotación alrededor del origen
[editar]
Dado un sistema de coordenadas en el plano S1 con origen en O y ejes x e y:
y una base ortonormal de este sistema:
Un punto A del plano se representará en este sistema según sus coordenadas:
Para un segundo sistema S2 de referencia girado un ángulo , respecto al primero:
y con una base ortonormal:
Al cálculo de las coordenadas del punto A, respecto a este segundo sistema de referencia, girado respecto al primero, se llama rotación alrededor del origen, siendo su representación:
Hay que tener en cuenta que el punto y son el mismo punto, ; se emplea una denominación u otra para indicar el sistema de referencia empleado. El valor de las coordenadas respecto a uno u otro sistema, sí son diferentes, y es lo que se pretende calcular.
La representación de B1 en B2 es:
Dado que el punto A en B1 es:
con la transformación anterior tenemos:
Y, deshaciendo los paréntesis:
reordenando:
Como:
- ;
Tenemos que:
Como sabíamos:
Por identificación de términos:
Que son las coordenadas de A en B2, en función de las coordenadas de A en B1 y de .
Escalado
[editar]Sea un punto con coordenadas (x,y) en el plano. Si se cambia la escala de ambos ejes en un factor λ, las coordenadas de dicho punto en el nuevo sistema de coordenadas pasarán a ser:
El factor de escala λ no necesariamente debe ser el mismo para ambos ejes.
Cálculo matricial
[editar]Siendo [T] la matriz de transformación y cuyas filas son igualmente las componentes de los vectores unitarios i ' y j ' respecto de los originales i y j, o si se prefiere, cuyas columnas son las componentes de los vectores unitarios originales en el sistema de referencia rotado.
Nota: Las magnitudes vectoriales están en negrita.
Véase también
[editar]Referencias
[editar]- ↑ Burton, 2011, p. 374.
- ↑ Un recorrido por el cálculo, David Berlinski.
- ↑ Axler, Sheldon (2015). El álgebra lineal bien hecha - Springer. Undergraduate Texts in Mathematics. p. 1. ISBN 978-3-319-11079-0. doi:10.1007/978-3-319-11080-6. Archivado desde el original el 27 de mayo de 2022. Consultado el 10 de abril de 2023.
- «Cartesian Coordinate System». Cut the knot (en inglés).
- Weisstein, Eric W. «Sistema de coordenadas». En Weisstein, Eric W, ed. MathWorld (en inglés). Wolfram Research.
- Weisstein, Eric W. «Coordenadas cartesianas». En Weisstein, Eric W, ed. MathWorld (en inglés). Wolfram Research.
Bibliografía adicional
[editar]- Brannan, David A.; Esplen, Matthew F.; Gray, Jeremy J. (1998), Geometry (en inglés), Cambridge: Cambridge University Press, ISBN 978-0-521-59787-6.
- Burton, David M. (2011), The History of Mathematics/An Introduction (en inglés) (7th edición), New York: McGraw-Hill, ISBN 978-0-07-338315-6.
- Smart, James R. (1998), Modern Geometries (en inglés) (5th edición), Pacific Grove: Brooks/Cole, ISBN 978-0-534-35188-5.
- Descartes, René (1637), Le Livre Premier de La Géométrie de Descartes (en francés), "livre premier".
- Descartes, René; Paul J. Oscamp (Traductor) (2001). Discourse on Method, Optics, Geometry, and Meteorology (en inglés) (Revised edición). Indianapolis, IN: Hackett Publishing. ISBN 978-0-87220-567-3. OCLC 488633510.
- Korn GA, Korn TM (1961). Mathematical Handbook for Scientists and Engineers (en inglés) (1st edición). New York: McGraw-Hill. pp. 55–79}. LCCN 59014456. OCLC 19959906. (requiere registro).
- Margenau H, Murphy GM (1956). The Mathematics of Physics and Chemistry (en inglés). New York: D. van Nostrand. LCCN 55010911. (requiere registro).
- Moon P, Spencer DE (1988). «Rectangular Coordinates (x, y, z)». Field Theory Handbook, Including Coordinate Systems, Differential Equations, and Their Solutions (en inglés) (corrected 2nd, 3rd print edición). New York: Springer-Verlag. pp. 9-11 (Table 1.01). ISBN 978-0-387-18430-2.
- Morse PM, Feshbach H (1953). Methods of Theoretical Physics, Part I (en inglés). New York: McGraw-Hill. ISBN 978-0-07-043316-8. LCCN 52011515.
- Sauer R, Szabó I (1967). Mathematische Hilfsmittel des Ingenieurs (en alemán). New York: Springer Verlag. LCCN 67025285.
Enlaces externos
[editar]- Coordenadas cartesianas, explicación interactiva (requiere java)
- Proyecto didáctico para introducción al plano cartesiano en lenguaje de programación Logo.
- Conversor de coordenadas: convierte entre coordenadas polares, cartesianas y esféricas.
- Coordinates of a point Herramienta interactiva para explorar las coordenadas de un puntot
- open source JavaScript class for 2D/3D Cartesian coordinate system manipulation
| Control de autoridades |
|
|---|
Datos: Q62912
Multimedia: Cartesian coordinates / Q62912