Neuroprothese
Unter dem Begriff Neuroprothesen versteht man Schnittstellen zwischen dem Nervensystem und der Anbindung an ein elektronisches Bauteil zur klinischen Anwendung und medizintechnischen Forschung. Klassischerweise werden einzelne Mikroelektroden bzw. Elektrodenarrays (z. T. über 100 Elektroden) verwendet (Santhanam 2006), um eingeschränkte, pathologische oder verloren gegangene Funktionen des Nervensystems zu korrigieren bzw. wiederherzustellen oder normale Funktionen zu verbessern (Rutten 2002, Schwartz 2004 & 2006). Diese technischen Schnittstellen lassen sich nach ihren Anwendungsgebieten grundlegend in motorische und sensorische Neuroprothesen unterteilen. Neuroprothesen sollen ausgefallene Nervenfunktionen ganz oder teilweise wiederherstellen oder als sog. substitutive Methode einen Ersatz darstellen.
Die Neurowissenschaften umfassen heute neben biologischen, medizinischen und psychologischen mittlerweile auch philosophische und v. a. auch immer mehr (informations)-technologische Fragestellungen. Die Frage, inwieweit sich die Aktivität des Gehirns durch elektrische Stimulation artifiziell simulieren lässt, ist dabei sogar älter als die ersten offiziellen Erkenntnisse, dass eben jene Aktionspotentiale die tragende Rolle in der Sprache des Nervensystems spielen (Galvani 1791, Du Bois 1849). Schon 1755 unternahm der Mediziner Charles le Roy Versuche durch elektrische Stimulation des Cortex (Großhirnrinde) bei blinden Patienten Seheindrücke hervorzurufen (Le Roy 1755). Die elektrische Stimulation des Cortex war damit eines der ersten Verfahren der Neurowissenschaften, welches ermöglichte, eine Beziehung zwischen der corticalen Physiologie und der Wahrnehmung herzustellen. Die Forschung und medizinische Anwendung zur elektrischen Stimulation neuronaler Strukturen hat binnen der letzten Jahre eine Revolution erfahren. Dazu tragen v. a. die neuen biotechnologischen Entwicklungen der Schnittstellen (Elektroden-Interfaces) und neue mathematische Algorithmen bei. Die stimulierten neuronalen Populationen können direkt aktiviert oder auch inaktiviert werden, was eine direkte Untersuchung der funktionellen Relevanz erlaubt, während Ableitstudien nur Korrelationen zwischen neuronaler Aktivität und perzeptuellen Effekten leisten (Cohen 2004). Die Elektrostimulation entwickelte sich so zu einem weit verbreiteten Verfahren für die Untersuchung einer Vielzahl neuronaler Funktionen: von der zellulären Funktionsweise über Wahrnehmung bis hin zur neuronalen Plastizität (Maldonado 1996, Ma 2005).
Motorische Neuroprothesen
[Bearbeiten | Quelltext bearbeiten]Die einfachsten motorischen Prothesen werden eingesetzt, um durch Applikation einer Trägerfrequenz die Aktivität bestimmter subcorticaler Kerngebiete generell zu fördern oder zu hemmen. Das Verfahren namens Tiefen-Hirn-Stimulation dient so schon länger der Behandlung von Morbus Parkinson oder ähnlichen basalganglionären, motorischen Krankheiten. Dabei wird beispielsweise der Ncl. subthalamicus, bei Morbus Parkinson chronisch überaktiv, durch hochfrequente Stimulation gehemmt (Volkmann 2004, McIntyre 2004, Tass 2003). Die Resultate eines solchen Hirnschrittmachers sind bisweilen von klinischen Gutachten sehr positiv bewertet worden, so dass in naher Zukunft neben weiteren psychomotorischen Krankheiten, wie dem Tourette-Syndrom, auch klassisch psychiatrische Erkrankungen, z. B. Depression, mit Tiefen-Hirn-Stimulation therapiert werden (Mayberg 2005). Ein ehrgeiziges Ziel zukünftiger motorischer Prothesen ist es, paralysierten Patienten durch Ableitung neuronaler Signale des (vornehmlich motorischen, aber nicht zwangsläufig primär motorischen) Cortex und einer Überführung in Steuersignale für technische Bauteile, eine teilweise Wiederherstellung ihrer motorischen Handlungsfähigkeit zu ermöglichen. Dabei haben vor allem Verbesserungen von Multi-Elektroden-Techniken zur Ableitung von Signalen ganzer Zellpopulationen massive Fortschritte ermöglicht (Nicolelis 2001, Chapin 2004). Diese Fortschritte haben mittlerweile sogar zu klinischen Studien an menschlichen Versuchspersonen geführt. In diesen soll untersucht werden, inwieweit sich auch hier neuronale Signale nutzen lassen, um Bewegungstrajektorien für Roboterarme, als mögliche Armprothesen, zu berechnen (Nicolelis 2003, Patil 2004, Hochberg 2006, Nicolelis-Experiment: Affe steuert Arm). Die tatsächliche Feinmotorik der menschlichen Hand zu rekonstruieren wird jedoch in absehbarer Zeit nicht erreichbar. Aktuelle Studien in Tierversuchen konnten durch elektrische Stimulation spezifischer Regionen komplexe motorische Antworten, wie Hand-zu-Mund-Bewegungen, Abwehrreaktionen oder Greifbewegungen evozieren. Uneinig ist man bislang, wie der Komplexitätsgrad ausgelöster Bewegungen vom Stimulationsort und den verwendeten Stimulationsparametern abhängt. Bedeutungsrelevante Bewegungen, die auch in Verhaltenskontexten genutzt werden, konnten bisher vom motorischen Cortex über den prämotorischen Cortex bis hin zum posterior-parietalen oder dem ventralen, intraparietalen Cortex durch Microstimulation evoziert werden (Graziano 2002 & 2005, Stepniewska 2005).
Nicht-invasive, humane Brain-Computer Interfaces: Es ist gelungen einem Patienten mit dem Locked-in-Syndrom durch Ableitung eines EEG durch Vorstellung bestimmter Bewegungsabläufe einen Mauscursor auf einem Computerbildschirm zu bewegen und E-Mails zu verfassen. Derartige humane, nicht-invasive Brain-Computer Interfaces (BCI) befinden sich ebenfalls noch in einem frühen Entwicklungsstadium. Unter anderem arbeitet Niels Birbaumer der Universität Tübingen an solchen nicht-invasiven humanen BCIs.
Sensorische Neuroprothesen
[Bearbeiten | Quelltext bearbeiten]Akustisch
[Bearbeiten | Quelltext bearbeiten]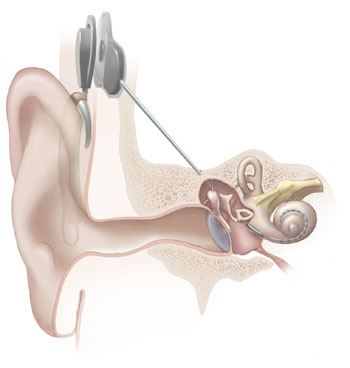
Die Aufgabe sensorischer Prothesen ist hingegen, physikalische Reize in neuronal verwertbare Signale zu übersetzen, um verloren gegangene Sinnesfunktionen wiederherzustellen oder zu ersetzen. Sensorische Prothesen sollen ihren Nutzern bedeutungsvoll strukturierte Perzepte ermöglichen und können auf verschiedenen Ebenen der Sinnesbahnen ansetzen. Auch hier befinden sich verschiedene Typen von neuroprothetischen Ansätzen bereits im klinischen Diskurs. Die bisher einzige tatsächlich therapeutisch erfolgreich eingesetzte sensorische Neuroprothese ist eine Innenohrprothese (Cochlea-Implantat, CI), welche den VIII. Hirnnerv (N. statoacusticus) direkt innerhalb der Hörschnecke stimuliert (Rubinstein 1999 & 2001, Middlebrooks 2005). Dadurch wird die mechanische Schallübertragung über das Innenohr und die Umsetzung in einen elektrischen Impuls durch die Haarzellen ersetzt. Die Qualität des Transplantats reicht bei weitem nicht an das natürliche Hörempfinden heran. Die Entwicklung dieser peripher ansetzenden Prothese ist jedoch bereits soweit vorangeschritten, dass einer bestimmten Gruppe schwerhöriger bis tauber Patienten tatsächlich das Verstehen von Sprache, z. T. sogar ohne Lippenlesekontrolle (wie am Telefon), wieder ermöglicht wird (Vandali 1995, Wilson 2003 & 2005, Vandali 2005).
Optisch
[Bearbeiten | Quelltext bearbeiten]Im Gegensatz zu den Erfolgen im auditorischen System können ähnliche Entwicklungen der neuroprothetischen Ophthalmologie bisher keine klinisch eingesetzten Therapien anbieten. Jedoch hat die Entwicklung einer Retina-basierten Prothese in den letzten Jahren enorme Fortschritte gemacht. So konnten schon deutlich komplexere Perzepte erzeugt werden, als einfache Lichtblitze, sog. Phosphene (Humayun 1999, Zrenner 2002, Alteheld 2004, Weiland 2005). Deutsche Forschungsgruppen, die sich mit Retina-Implantaten beschäftigen sind u. a. in Tübingen unter der Leitung von Eberhart Zrenner. Man unterscheidet subretinale und epiretinale Implantate.
Hirnstamm-Implantat
[Bearbeiten | Quelltext bearbeiten]Periphere Neuroprothesen, wie das CI und Retina-Prothesen, können nur einem bestimmten Patientenkreis helfen, bei denen die Schädigung tatsächlich vor dem eigentlichen Interface auftreten (z. B. fehlende Schallleitung über die Hörknöchelchen bei der Innenohrtaubheit).
Um einen weiteren Patientenkreis erreichen zu können, wurde in den letzten Jahren das sogenannte Hirnstamm-Implantat (Auditory Brainstem Implant, ABI) weiterentwickelt. Das ABI ist ein modifiziertes CI, wobei nicht der Hörnerv direkt stimuliert, sondern der erste Umschaltknoten des afferenten auditorischen Systems, der Ncl. cochlearis im Hirnstamm (Lenarz 2001, Kuchta 2004, Lenarz 2006, Samii 2007). Aktuelle Studien von Thomas Lenarz und Kollegen beschäftigen sich mit einer weiteren Form der zentralen Hörprothese im Mittelhirn (Auditory Midbrain Implant, AMI). Dabei stimulieren sie mit bisher 16 Elektroden spezifische Frequenzkolumnen im Colliculus superior (Samii 2007, Lim 2007, 2008). Jedoch steigt der technische Aufwand und das klinische Risiko mit solchen zentralen Transplantaten, wie dem ABI, enorm an. Auch für das visuelle System gibt es bereits Versuche, durch direkte Stimulation des Sehnervs(Veraart) oder durch eine direkte corticale Stimulation am visuellen Cortex (Dobelle u. a.) Seheindrücke zu evozieren. Der direkte Kontakt mit dem sensorischen Cortex bietet Vorteile gegenüber subcorticalen Strategien. Der Kontakt mit dem biologischen Gewebe ließe sich, anders als beispielsweise bei der Retina, sehr stabil gestalten, indem der Knochenschädel als Fixation für das neuroprothetische Implantat dient. Die Größe und die Zellanzahl im Cortex ist weitaus größer und bietet rein sterisch schon mehr Platz für größere Elektrodenarrays, was für die Wiederherstellung der sensorischen Funktion aus informationstechnologischer Sicht von Vorteil sein könnte. Weiterhin ließe sich damit ein therapeutisch breiterer Bereich an Krankheitsätiologien behandeln, da prinzipiell Störungen des afferenten sensorischen Systems auf allen Ebenen ersetzbar wären (Normann 1999, Donoghue 2002 & 2004).
Moderne Konzepte einer interaktiven, corticalen Neuroprothese
[Bearbeiten | Quelltext bearbeiten]Dass die Erzeugung visueller oder auditorischer Perzepte durch die Stimulation corticalen Gewebes mit elektrischem Strom prinzipiell möglich ist, konnte hingegen in einer ganzen Reihe von Humanexperimenten gezeigt werden (Brindley 1968, Dobelle 1974 & 1976, Bak 1990, Schmidt 1996). Alle untersuchten Patienten berichteten dabei übereinstimmend von modalitätsspezifischen Basiseindrücken, wie Phosphene und Audene. Die Annahme, man könne durch mehrkanalige Implantate die nötige Komplexität corticaler Aktivitätsmuster simulieren, um tatsächlich perzeptuell Objekte zu erzeugen, wurde schon vor etwa 50 Jahren geäußert (Krieg 1953). Es folgten Arbeiten zur gleichzeitigen elektrischen Stimulation vieler Orte des visuellen Cortex als Ansatz einer Sehprothese für Blinde von Brindley, Dobelle und anderen Kollegen. Immerhin gelang es Dobelle 1976 einer langzeitlich erblindeten Patientin das Lesen von Braille-Buchstaben über ein solches corticales Interface zu ermöglichen – allerdings nur weitaus langsamer als ihr dies taktil möglich war. Verantwortlich dafür machte man die geringe räumliche Akkuratesse einer oberflächigen Stimulation, welche nicht genügend unabhängige Kanäle für Informationen zur Verfügung stelle. Daraus entwickelte sich die räumlich weitaus spezifischer applizierbare Intracorticale Microstimulation. Doch auch hiermit konnten bis heute nur bedeutungslose und unstrukturierte Perzepte evoziert werden (Troyk 2003).
Letztlich muss der klassische Codierungsansatz für corticale sensorische Neuroprothesen als gescheitert angesehen werden. Sämtliche Studien zu sensorischen Neuroprothesen seit Brindley und Lewin haben keine grundsätzlich neuen Erkenntnisse erbracht, wie mit bisherigen Stimulationsparametern und Elektrodenkonfigurationen komplexe Informationen in das Gehirn übertragen werden können (Dobelle 2000). Aktuelle Bemühungen dieses Scheitern zu erklären fokussieren dabei v. a. auf eine konzeptuelle Weiterentwicklung des Codierungsansatzes, welche die nötige Lernleistung, im Sinne einer anwendungsorientierten Praxis, als ein Hauptkriterium ansieht, um bedeutungsrelevante corticale Erregungen zu evozieren (Scheich 2002). Moderne Konzepte corticaler Neuroprothesen könnten daher versuchen die biophysikalischen und physiologischen Parameter elektrischer Stimulation (Butovas & Schwartz 2003, 2006 & 2007, Tehovnik 2006) mit den Konzepten der sensorischen Substitution von Bach-y-Rita (1969 & 2004) zu kombinieren. Ein elektrischer Stimulus würde dann nicht mehr als eine Wiederherstellung des verlorenen Inputs verstanden, sondern als abstrakter, stimulus-gekoppelter Input, dessen Bedeutung erst erlernt werden müsste. Die Generierung von bedeutungsrelevanten Perzepten wird im Zusammenhang mit der Philosophie der embodied cognition als Konstrukt des Wechselspieles zwischen Körper, Gehirn und Umgebung diskutiert (Chiel 1997, Thompson 2001). Diese Sichtweise wird durch viele empirische Befunde gestützt. Eine solche Strategie bei der Entwicklung einer interaktiven, sensorischen Cortexprothese im Tierversuch wird von der Arbeitsgruppe „Neuroprothesen“ am Leibniz-Institut für Neurobiologie in Magdeburg unter der Leitung von Frank W. Ohl unternommen.
Ethische und philosophische Aspekte
[Bearbeiten | Quelltext bearbeiten]Die Erzeugung oder Veränderung von Verhaltensweisen durch elektrische Stimulation des Großhirns ist ein ethisch und philosophisch vielschichtiges Problem. Die Frage der Selbstverursachung ist bereits unter physiologischen Gesichtspunkten umstritten (John Searle 2007), doch eine Studie von Talwar et al. (2002) navigierten die Forscher Laborratten durch Implantation dreier Mikroelektroden quasi per Fernsteuerung durch selbst hochkomplexe Labyrinthe und über vermeintliche Gefahren hinweg – genannt die Roborat. Eine Elektrode innerviert im medialen Vorderhirnbündel, um das dopaminerge Belohnungssystem anzuregen. Zwei weitere Elektroden simulieren jeweils sensorische Einflüsse der linken bzw. rechten Barthaare im Barrel-field des somatosensorischen Cortex. Die Belohungselektrode wird jeweils mit dem virtuell taktilen Perzept Links oder Rechts gepaart und die Ratte setzt sich in Bewegung (Talwar 2002, Nicolelis 2002). Das amerikanische Militär fördert diese Forschung in Millionenhöhe. Die zentrale Forschungsagentur des Pentagons (Defence Advanced Research Projects, DARPA) hat das Programm Enhanced Human Performance ins Leben gerufen, um nach Darpa-Direktor Anthony Theter „den Mensch nicht zum schwächsten Glied im US-Militär werden zu lassen“.
Literatur
[Bearbeiten | Quelltext bearbeiten]- A. Abott: Neuroprosthetics. In Search of the Sixth Sense. In: Nature. 442, Juli 2006, S. 125–127.
- J. K. Chapin, M. A. L. Nicolelis: Neuroprothesen – Roboter steuern von Geistes Hand. In: Spektrum der Wissenschaft. 1, 2003.
- A. Krämer: Kommt die gesteuerte Persönlichkeit? In: Spektrum der Wissenschaft. 9, 2007, S. 42–49.
- F. W. Ohl, H. Scheich: Neuroprothetik. Hitech im Gehirn. In: Gehirn und Geist. 10, 2006, S. 64–67.
- F. W. Ohl, H. Scheich: Chips in your head. In: Scientific American Mind. April/Mai 2007, S. 64–69.
- H. Scheich, A. Breindl: An Animal Model of Auditory Cortex Prostheses. In: Audiology and Neurotology. 7-3, Mai/Juni 2002, S. 191–194.
- A. Schwartz: Cortical neural prosthetics. In: Annual Reviews in Neuroscience. 27, 2004, S. 487–507.
- I. Wickelgren: Tapping the Mind. In: Science. 299, 2003, S. 496–499.
- I. Wickelgren: A Vision for the Blind. In: Science. 312, 2006, S. 1124–1126.
Weblinks
[Bearbeiten | Quelltext bearbeiten]- Fraunhofer Institut Biomedizinische Technik IBMT
- Ein Lichtblick für Blinde Beitrag über die Entwicklung von Netzhautprothesen im Zusammenhang mit Retinitis Pigmentosa im Online-Magazin sciencegarden (September 2006)
- Homepage der Forschungsgruppe Neuroprothesen am Leibniz-Institut für Neurobiologie, Magdeburg
- Forschungsverbund Neuroprothetik Otto-von-Guericke Universität und Leibniz-Institut Magdeburg
- Treffen des Nationalen Ethirates zum Forum Bioethik mit dem Thema Neurimplantate: Stimulus oder Steuerung?
- Stereotaktische und Funktionelle Neurochirurgie, Universität Tübingen
- Roborat2.
- BCI TU Graz
- Brain-Computer Interface Research Information
- Cyberkinetics Neurotechnology Systems, Inc.
- Information on the NeuroControl Freehand System
- Miguel Nicolelis´ Lab
- Neuroprothesen mit Hilfe der Nanotechnologie